MotionSim
version PC
MotionSim est un logiciel libre de modélisation et de simulation mécanique (système multi-articulé). L’objectif de cette application est double :
- C’est un outil pédagogique permettant de se familiariser avec des logiciels de conception et de modélisation/simulation de systèmes mécanique.
- C’est aussi un outils de calcul pouvant être utilisé dans le cadre de recherches et d’études (mécanique, biomécanique, …)
Sa particularité est d’intégrer différents moteurs de calculs dans une même et seule interface commune :
Tous ces moteurs de calcul sont en « Open Source » et peuvent donc être facilement téléchargés (cf. liens) afin de connaitre le détail de leurs implémentations. La documentation (parfois très succincte !) donne aussi un aperçu des méthodes de calcul et des concepts théoriques utilisés.
La version actuelle (0.811, avril 2021) corrige les bogues les plus importants (affichage, calcul des contraintes, etc.) et ajoute quelques fonctionnalités :
- possibilité d’utiliser des scripts (JavaScript) pour piloter la simulation
- ajout d’exemples (dans le répertoire exemple du répertoire programme)
- Possibilité de piloter le déclenchement de la simulation par un programme externe (VRPN sync)
La version (0.81 de janvier 2021) à été complètement réécrite et est disponible (version PC uniquement pour l’instant, Linux et Mac en cours]).
En particulier la vitesse de calcul à été optimisée (gain de 10 à 100 par rapport à l’ancienne version) permettant ainsi une simulation en temps réel. Cependant, la compatibilité des fichiers n’est plus assurée par rapport à l’ancienne version (cette fonctionnalité sera développée dans un avenir proche).
Les caractéristiques principales sont maintenues et quelques fonctions de Réalités Virtuelles ont été ajoutées.
Le moteur d’affichage (utilisant OpenGL 3.3 et supérieur) est en cours de réécriture (optimiser la vitesse de l’ensemble) afin exploiter les cartes graphiques récentes à des fins de Réalité Virtuelle (disponibilité : juin 2022).
Des entrées (analogiques et trackers 3D) de type VRPN et OSC ont aussi été ajoutées pour augmenter les interactions possibles entre MotionSim et des périphériques externes.
La liaison avec des casques de réalité virtuelle est aussi en cours de développement en utilisant OpenVR.
Parallèlement au développement de l’affichage et de l’interface avec les moteurs de calcul, un langage de type JavaScript est en cours de d’implémentation. Ces scripts permettront de piloter complètement le logiciel (création de modèles, pilotage de la visualisation et de la simulation (un éditeur de script sera incorporé dans une version ultérieur du logiciel).
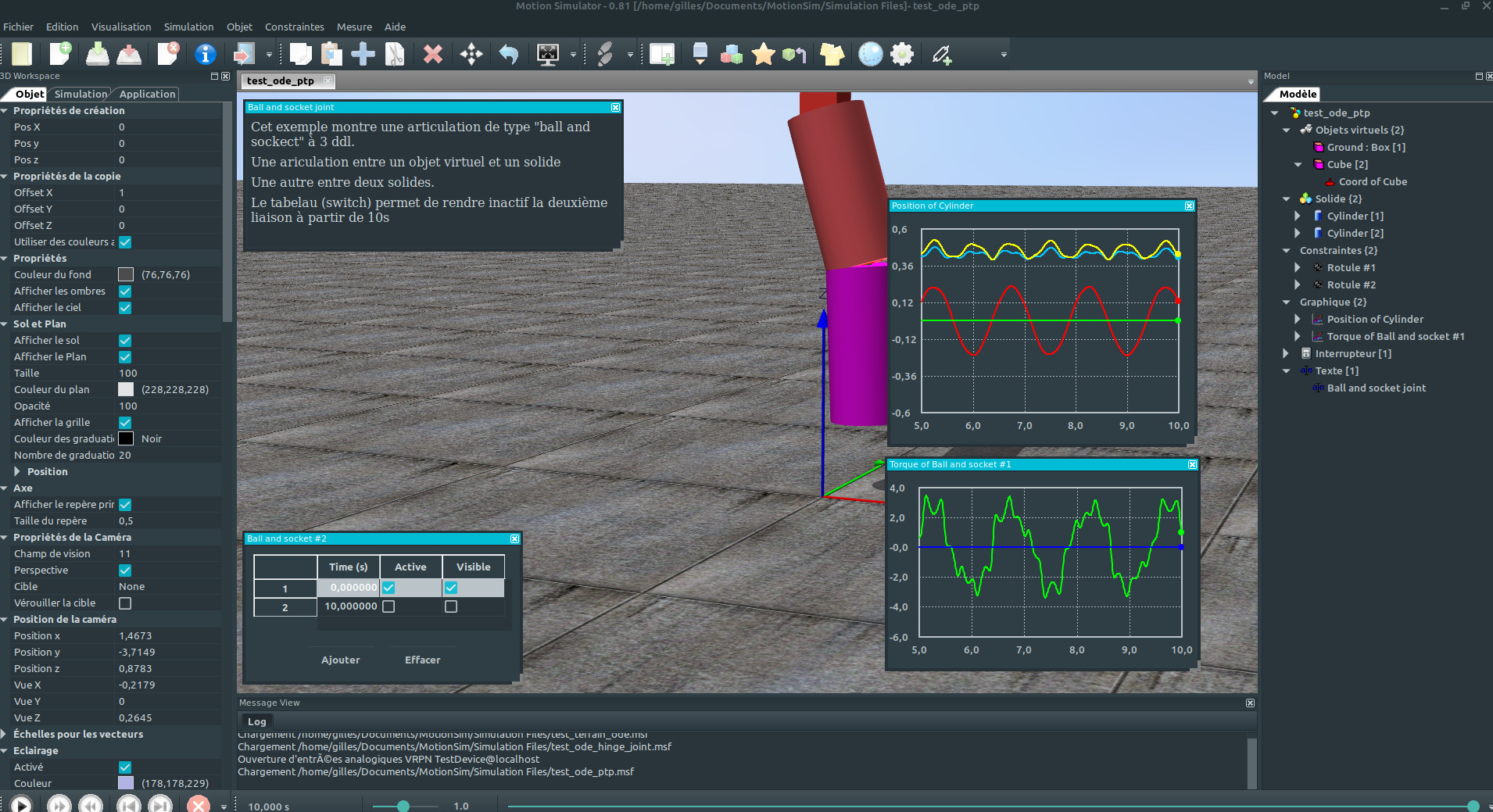
n.b. – dans cette version (0.81), seul le moteur ODE est actif, les autres sont en cours de test et seront disponible très prochainement (version 0.82 pour Bullet, 0.83 pour Newton Dynamics et 0.84 pour l’ajout de SimBody).
Télécharger la version PC (Install)
Télécharger la version PC (ZIP)
version Linux
Ancienne version (0.56)
La version actuelle (0.56, septembre 2016) est limitée : seules quelques liaisons sont disponibles (sphérique, pivot, prismatique, cylindrique et rigide) pour l’ensemble des 4 moteurs de calcul. Ces liaisons sont communes à tous les moteurs de calcul, un modèle peut alors être calculé en utilisant les différents moteurs.
Il existe cependant des liaisons et des contraintes spécifiques en fonctions du type de moteur de calcul choisi (dans ce cas il n’est plus possible de calculer un même modèle avec différents moteurs)
Les collisions ne sont fonctionnelles que pour ODE, Bullet Physics et Newton Dynamics.
Toutefois pour Newton Dynamics, la prise en charge des collisions a été grandement simplifiée dans cette version : les caractéristiques du matériau n’est pas complètement pris en charge . Ces fonctionnalités seront développées dans les versions ultérieures.
Les contraintes sont aussi très simples et seront développées dans les futures versions.
Pour ce qui est de SimBody, les collisions sont en cours de test et permettront (normalement) une meilleurs quantification des interactions de type choc ou contact.
Note de version
La version actuelle (0.56) prend maintenant en charge les objets composites (objets composés de plusieurs primitives) ainsi que des formes 3D importées à partir de fichiers OBJ, 3DS et STL (calcul des caractéristiques massiques inertielles des objets).
La gestion OpenGL a été modifiée et sera améliorée au cours des versions ultérieures (utilisation des moteurs OpenGL récents, éclairages, caméras multiples, …).
Vous pouvez laissez un commentaires ici
Documentation
- Prise en main
- Notion de liaisons entre solides
- Collisions et contacts (en cours…)
- Pilotage de la simulation (en cours…)
- Script et modélisation (à venir)
Téléchargements (ancienne version 0.56 suelement)
Application pour Windows (Application pour Linux prochainement disponible).
Attention, cette application ne fonctionne pas sous Windows XP.
- version avec installeur (nécessite les droits administrateur) Télécharger MoSim 0.56 (64 Bits)
- version ZIP 64 bits (décompacter les fichiers dans un répertoire et lancer directement l’application)
Télécharger la version ZIP (64 bits) - Version ZIP 32 bits
Télécharger la version ZIP (32 bits)